Rotorn
Rotordisken ( nav + rotorblad ) har en så stor hastighet och svängmassa att den följer lagarna för gyroskop. Det innebär att dels skall anbringade krafter tillföras 90 grader före ( i rotationrriktningen ) önskad angreppspunkt, dels att rotordisken i sin helhet försöker motverkar varje rörelseändring.
Rotorer indelas i tre huvudgrupper:
Stel rotor: bladen kan endast skevas ( ändring av anfallsvinkel ). 2-bladiga.
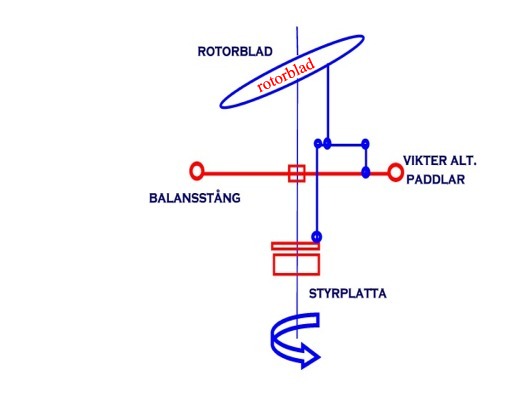
Halvstel rotor: bladen kan skevas och rotordisken i sin helhet kan flappa. Ofta förses rotorn med en balansstång, tvärs bladens längdriktning. 2-bladiga.
Helt ledad rotor: bladen kan skevas, flappa och svänga helt individuellt. Flerbladiga rotorer.
Skevning innebär att bladen kan vridas kring sin egen axel, och därmed ändra anfallsvinkel.
Flappa innebär att bladen kan röra sig något i höjdled kring en infästningspunkt intill navet.
Svängning innebär att bladen kan röra sig något i horisontalplanet.
På modellhelikoptrar förekommer nästan uteslutande "modifierad" stel rotor. Rotornavet är fast fixerat vid rotoraxeln likt en stel rotor, men är försedd med en balansstång (jmfr. paddelstång). Bladen på vissa typer kan flappa något genom infästning i en gummibussning. Vid en ändring av gyrosnurrans läge skulle ju kraftens angreppspunkt ligga 90 grader före i rotationsriktningen. Ser man på en modell, så lutar ju ändå styrplattan framåt vid flygning framåt o s v. Detta beror på att man "styr" med balansstången (paddelstången) som genom länksystem överför rörelsen till rotorbladen 90 grader senare. Att rörelsen går "via" paddelstången är för att dämpa rörelsen och få ett mera stabilt gyrosystem än om man infört förändringen direkt på bladen. På en riktig helikopter styr man balansstången i ett "plan", medan man på en modell styr paddelstången i två plan, dels i horisontalplanet, dels vridning kring sin egen axel ("pitchändring av paddlarna).
En stor skillnad mellan modell och fullskala är att styrplattan är fast fixerad på de flesta modeller, medan den alltid är rörlig i horisontalplanet på en riktig. Dock börjar det mer och mer komma helikoptrar med CCPM-mixning (Cyclic collektiv pitch mixing ). Det innebär att styrplattan "åker upp och ned på rotoraxeln", vilket påverkar anfallsvinkeln ("pitchen") på resp. blad. Styrplattan styrs då av tre servon (120graders-mixning) som elektroniskt får samma signal vid enbart pitchändring. Styrplattan rör sig horisontellt längs axeln (stigkontrollsystemet ). Får styrplattan dessutom en signal från cykliska systemet (framåt, bakåt eller åt någon sida), rör sig styrplattan också längs axeln, men dock med en viss lutning i enlighet med cykliska systemets impuls.
Styrsystemet i en helikopter delas in i tre olika system:
stigkontrollsystemet (bladens anfallsvinkel)
cykliska kontrollsystemet ( ändring av anfallsvinkeln under varvet ).
girkontrollsystemet (ändrar stjärtrotorns anfallsvinkel).
Det finns ytterligare krafter och moment som man måste ta hänsyn till på en riktig helikopter, men som på en modell är av underordnad betydelse och kan anses försumbara. Dit hör t ex vridande moment på flygkroppen från stjärtrotorn, då den sitter på annan höjd än huvudrotorn. Detta motverkas av att styrplattan ställs lite snett (åt motsatt håll), vilket även motverkar stjärtrotorn tendens att vilja flytta hela helikoptern i sin dragriktning. En helikopters kropp hänger normalt lite "snett" vid hovring och flygning.
Huvudrotorns varvtal hos en modellhelikopter ligger på c:a 1400 till 1900 rpm. För en riktig helikopter ligger varvtalet på c:a 350 till 450 rpm. På en rotor med 12 meters diameter ger 400 rpm en spetshastighet på 250 m/sek.
Vill du läsa mera om aerodynamik ?